Majáček.
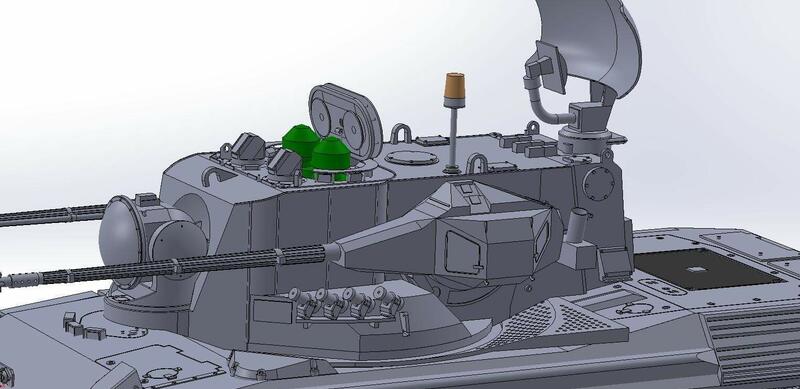
Na mnoha fotkách a videích Gepardu je zachycen maják.
Také si ho na model dám.
 Nejprve elektronika.
Nejprve elektronika.
Jeho zapínání se provede přivedením 5V. Na přijímači je výstup PWM, což je pro přímé ovládání nevhodné.
Jsou možná řešení:
• Za přijímač dát elektronický spínač
• SBUSem přivést signál do zvukového modulu USM-RC-3. Plus výstupu Out je ale spojen s plus Aku, tj. 7.2V. S vypočteným předřadným odporem to nefunguje, fakže je nutný regulátor z 7,2 na 5V.
Obě tato řešení vždy vyžadují další elektronický prvek a další vodiče.
• A moje řešení: Využít další digitální vstup (PWM) a výstup (5V) stávajícího Arduina. Pro zap/vyp majáčku bude potřeba navíc
jediný vodič (data PWM). +-5V je již v Arduinu.
Proto jsem přepracoval zapojení DPS. (Verze 2.)
Současně jsem na desce zařadil další vstupy a výstupy za účelem maximálního snížení počtu vodičů z korby do věže.
Samozřejmě přeprogramoval Arduino.
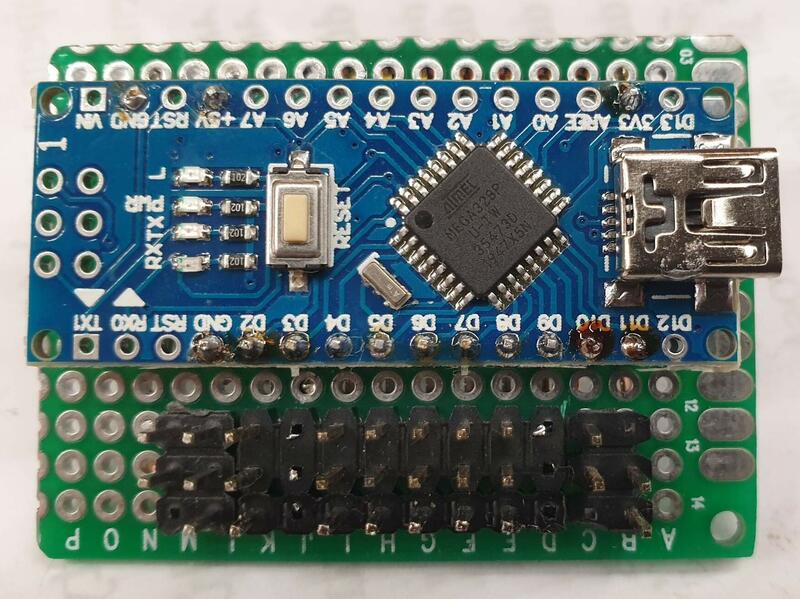
Objednal jsem si otočné kontakty a čekám. Abych vše vyzkoušel, vyrobil jsem prozatímní kabel.
Na fotce je vidět DPS s Arduinem (které přijde do věže), kabel a pochopitelně nejsou zapojené další části věže.
 Majáček
Majáček

Datový kablík majáčku jsem prostě ucvaknul, nebude již třeba.
Majáček bude vyndavací s položením, aby se při transportu neulomil.
Závěrem.
devíti vodiči ovládám:
- 6 serv
- 1 halovou sondu
- 1 krokový motor
- zapínání majáčku
- 2 led kanónů
Omlouvám se, že jsem se tak rozepsal. Snad to někomu pomůže.






